APPH3200 Mechanics
Useful Identities
Acceleration
Polar
\[\ddot{\vec{r}} = (\ddot{r} - r\dot{\theta}^2)\hat{r}+(r\ddot{\theta}+2\dot{r}\dot{\theta})\hat{\theta}\]Cylindrical:
\[\ddot{\vec{r}} = (\ddot{r} - r\dot{\theta}^2)\hat{r}+(r\ddot{\theta}+2\dot{r}\dot{\theta})\hat{\theta} + \ddot{z}\hat{z}\]Spherical (won’t be tested)
Trig Identity
\[\frac{1}{T}\int_0^T \sin(2\pi \frac{t}{T}) dt = \frac{1}{T} \frac{T}{2} = \frac{1}{2}\]Length and Angle
Ellipse:

Hyperbolics
\[\sinh (x) = \frac{e^x - e^{-x}}{2}\] \[\cosh (x) = \frac{e^x + e^{-x}}{2}\]Mass to Charge EoM
| Mass EOM | Charge EOM | Meaning |
|---|---|---|
| $m\ddot{x}$ | $L\ddot{q}$ | Inductance |
| $b\dot{x}$ | $R\dot{q} = RI$ | Resistance |
| $kx$ | $\frac{1}{C}q$ | Capacitance |
Chapter 3
| Conditions | Equations | Comments |
|---|---|---|
| Linear restoring force + a Damping term $F_d=-b\dot{x}$ | EoM $\ddot{x}+2\beta \dot{x}+\omega_0^2x=0$ | If the linear force is $F=-kx$, then basically $m\ddot{x}+b\dot{x}+kx = 0$ |
| $\frac{d^2}{dt^2}+a\frac{d}{dt}+b \to \mathcal{L}$ is a linear operator | ||
| Characteristic equation: $\omega^2 + 2\beta \omega i - \omega_0^2 = 0$ | Solve using $z=Ae^{i\omega t}$. | |
| If $\beta^2 > \omega_0^2$, then $\omega$ is imaginary | Overdamp, solution is exponential drop | |
| If $\beta^2 < \omega_0^2$, then $\omega$ is real | Underdamp, solution is sinusoidal but dropping | |
| If $\beta^2 = \omega_0^2$, then only one $\omega$ solution | Critical Damp, solution is $(A+Bt)e^{-\omega_0 t}$. (this actually drops fastest) | |
| Damping with Driving Force $F_{drive}=F_0 \cos(\omega_d t)$ | EoM $\ddot{x}+2\beta \dot{x}+\omega_0^2x=A\cos(w_dt)$ | |
| Solution is $x = x_{homo} + x_{part}$ | $x_{homo}$ is jus the solution with pure damping | |
| $x_{part} = A_s \sin(\omega_d t) + A_c\cos(\omega_d t)=D\cos(\omega_d t - \delta)$ | ||
| Resonance (basically happens when we have a driving force) | $w_R = \sqrt{\omega_0^2 - 2 \beta^2}$ | Solve $D$ for $x_{part}$ gives $D=\frac{F_0/m}{\sqrt{(\omega_0^2-\omega^2)^2 + 4\omega_0^2\beta^2}}$ |
| Then resonance is defined as $\frac{dD}{d\omega} = 0$, i.e. when response amplitude is highest | ||
| Mechanical to Electrical | 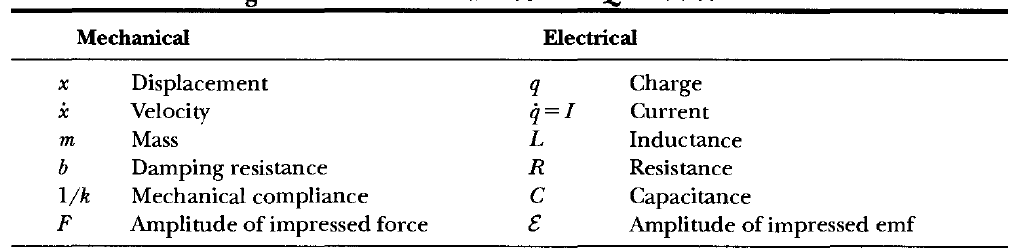 |
Basically $x\to q$, and $m\to L$. The rest I know. |
| Fourier Series, any function can be represented as a series of sin and cos | $F(t)=a_0 + \sum_{n=1}^\infty a_n \cos(n\omega t) + \sum_{n=1}^\infty b_n \sin(n\omega t)$ | Coefficients $a_n, b_n$ can be found using orthogonality |
| $\mathcal{L}\left[ \sum \alpha_n x_n(t) \right]= \sum \alpha_n F_n(t)$ | Then the above is useful because any driving force can be expressed as a Fourier series | |
| Proof: If $\mathcal{L}[x_n]=F_n(t)$, then use linearity |
Special Note
When dealing with damping + driving force being discontinuous: $F_{drive}=H(0)$, then we can also analyze the question discontionusly:
-
$t < 0$, $x=0$
-
$t \ge 0$, we have EOM being:
\[\ddot{x}+2\beta \dot{x}+\omega_0^2x=H(0)\]and solve normally
Then, an impulse $F_{drive}=I(0,1)=H(0)-H(1)$. Realize the EOM is then in the form of:
\[\mathcal{L}[x] = H(0)-H(1)\]so it is a linear combination of solutions each for:
- $\mathcal{L}[x_1] = H(0)$
- $\mathcal{L}[x_2] = -H(1)$
- $x = x_1 + x_2$
Lastly, if we have a delta function as impulse:
\[\ddot{x}+2\beta \dot{x}+\omega_0^2x=\delta(t)\]Consider again discontinuously, but now basically:
-
$t<0$, $x=0$
-
$t \ge 0$, we have one more constraint to satisfy as $\int_{\epsilon}^{\epsilon}\delta(t)=1$, integrating the EOM gives:
\[\left. \frac{dx}{dt}\right|_{>0} - \left. \frac{dx}{dt}\right|_{<0}=1\]
Chapter 5
| Condition | Equation | Comments |
|---|---|---|
| Conservative force | $\nabla \times F = 0$ | Since $\oint F\cdot dr = \int \nabla \times F = 0$ |
| Gravitational Potential | $-\nabla \Phi = \vec{g}$ | $\Phi$ is the potential |
| $U=m\Phi$ | ||
| $d\Phi = dW$ | work done needed to bring unit mass in a field $g$ for a distance $d\vec{r}$ | |
| proof by $dW=-\vec{g}\cdot d\vec{r}=\nabla \Phi \cdot d\vec{r}=d\Phi$ | ||
| Computing gravitational Potential | $\phi = -G \int_V \frac{\rho(r’)}{r}dV’$ | Basically comes from $\phi = -GM/r$ |
| Poisson’s Equation | $\nabla^2\Phi = 4\pi G \rho$ | True anywhere in space. Useful for computing gravitational force |
| $\nabla \cdot g = -4\pi G\rho$ | Same equation as above |
Special Notes
A good way to compute/construct integrals for continuous body is to consider:
-
write out:
\[d\Phi = -G\frac{dM}{r}\] -
Figure out what is $dM$ in the geometry. For instance, if we have a circular disk
Then
\[\begin{align*} dM &=\rho dV\\ &=\rho r'\,dr'd\theta dz\\ &= \rho2\pi xdx \end{align*}\]where the last equality comes from integrating $d\theta$ and changing $r’=x$.
- always remember you have two coordinates, $r’$ which is origin to the mass, and $r$ which is point of interest to the mass. Your goal is just two relate the two quantities in the integreal
-
Now the integral comes out easy, since $r^2 = x^2 + z^2$
\[\begin{align*} \Phi &= \int -G\frac{dM}{r}\\ &= -G\int_a^b \frac{\rho (2\pi x)dx}{r}dx\\ &= -G\int_a^b \frac{\rho (2\pi x)dx}{\sqrt{x^2 + z^2}}dx \end{align*}\]
Another good way to solve for $\Phi$ is to use Poisson’s equation. Given some $\rho$, we know that:
-
By definition
\[\nabla^2\Phi = 4\pi G \rho\] -
If we have spherical symmetry, or whatever, write expand $\nabla^2 \Phi$
\[\frac{1}{r^2}\frac{\partial }{\partial r}\left(r^2 \frac{\partial \Phi}{\partial r}\right) = 4\pi G \rho\]Note that now you are thinking from the origin towards outside, where $r$ is distance from origin.
Then this is just an equation of $\Phi$. Solve for $\Phi$. e.g. For thin shell, area outside/outside the shell has $\rho = 0$, so we immediately have:
\[\frac{\partial }{\partial r}\left(r^2 \frac{\partial \Phi}{\partial r}\right) = 0\]then inside the shell it should be $\frac{\partial \Phi}{\partial r} = 0$, and outside $\frac{\partial \Phi}{\partial r} = k/r^2$
- the constant is found when solving for continuity at $r=r_0$ which at the shell
Chapter 6
| Condition | Equation | Comments |
|---|---|---|
| Minimize $J=\int f(y_i, y_u’;x)\,dx$, such that $\frac{dJ}{d\alpha}=0$ | $\frac{\partial f}{\partial y_i} - \frac{d}{dx}\frac{\partial f}{\partial y_i’}=0$ | |
| Minimize $J$, such that $\frac{dJ}{d\alpha}=0$, but also $\frac{df}{dx}=0$ | \(\frac{d}{dx}(f - y'\frac{\partial f}{\partial y'})=0\) | Same as above, but can be easier to compute |
| Minimize $J$, such that $\frac{dJ}{d\alpha}=0$, but also with $j$ constraints $g_j(y_i;x)=0$ | $\frac{\partial f}{\partial y_i} - \frac{d}{dx}\frac{\partial f}{\partial y_i’} + \sum_j \lambda_j(x)\frac{\partial g_j}{\partial y_i}=0$ | Used when need constraint force, $\lambda_j(x)$ is some unknown |
| $g_j(y_i;x)=0$ | Useful since force of constraint is $Q_i = \sum_j \lambda_j(x)\frac{\partial g}{\partial y_i}$ | |
| Minimize $J$, such that $\frac{dJ}{d\alpha}=0$, but also with Integral $j$ constraints $\int_a^b g_j(y_i;x)=l$ | $\frac{\partial f}{\partial y_i} - \frac{d}{dx}\frac{\partial f}{\partial y_i’} + \sum_j \lambda_j( \frac{\partial g}{\partial y}-\frac{d}{dx} \frac{\partial g}{\partial y’})=0$ | |
| $\int_a^b g_j(y_i;x)=l$ | ||
| Simple constraint optimization $J=J(y)$ is not an integral. Constraint is $g$ | $\frac{\partial J}{\partial y_i} + \sum_j \lambda_j \frac{\partial g_j}{\partial y_i}=0$ | Basically from that: $\nabla J = -\lambda \nabla g$ |
Special Notes
The equation to note here is the 3.1 one:
\[\frac{\partial f}{\partial y_i} - \frac{d}{dx}\frac{\partial f}{\partial y_i'} + \sum_j \lambda_j(x)\frac{\partial g_j}{\partial y_i}=0\]notice that the sum is also over all the constraints.
Chapter 7
| Condition | Equations | Comments |
|---|---|---|
| Hamiltonian’s minimizing least action $J=\int (T-U)dt$ | $\frac{\partial L}{\partial q_i} - \frac{d}{dt}\frac{\partial L}{\partial q_i’}=0$ | Basically $L=T-U\to f$, independent variable is often $t$ instead of $x$ |
| We are in generalized coordinate, where $q_1,…q_s$ represents the $s$ degrees of freedom of the system | ||
| Transformation between $q_i,…q_s$ to $x_1, …,x_n$ in cartesian | $x_i=x_i(q_1,…,q_s)$ | e.g. $x=l\sin\theta$ for $\theta = q$ is the generalized coordinate |
| \(x_i'=x_i'(q_1,...,q_s,q_i',...,q_s')\) | ||
| Legrangian with constraint $f(x_i;t)=0$ | $\frac{\partial L}{\partial q_i} - \frac{d}{dt}\frac{\partial L}{\partial q_i’} + \sum_j \lambda_j(t)\frac{\partial f_j}{\partial q_i}=0$ | Basically the analog |
| $f_j(q_i;t)=0$ | ||
| $Q_i =\sum_j \lambda_j(t)\frac{\partial f_j}{\partial q_i}$ | is the i-th force of constraint | |
| Hamiltonian definition | $H \equiv \sum_j\dot{q}_j\frac{\partial L}{\partial \dot{q}_j} - L\equiv \sum_j\dot{q}_jp_j - L$ | Derived from assuming a closed system, so that $\frac{\partial L}{\partial t} = 0$ |
| 1) if closed system, 2) If transformation equation is time independent, 3) and potential is only dependent on position | $E=H$ | A faster way to write out $H$ if condition holds |
| Symmetry and In a closed system for Lagrangian | $\frac{\partial L}{\partial t}=0$, then $E$ is conserved | Time Homogenous |
| $\frac{\partial L}{\partial x_i}=0$, $p_i$ momentum is conserved | Space Homogenous | |
| $\frac{\partial L}{\partial \theta}=0$, angular momentum is conserved | Space isotropic | |
| Hamiltonian’s Equation | $p_j \equiv \frac{\partial L}{\partial \dot{q}_j}$ | canonical momentum |
| $H (q_i, p_i;t)\equiv \sum_j\dot{q}_jp_j - L$ | Hamiltonian. Need to encode everything in the end to only include $H (q_i, p_i;t)$ | |
| $\dot{q}_j = \frac{\partial H}{\partial p_j}$ | ||
| $\dot{p}_j = -\frac{\partial H}{\partial q_j}$ | Equations of Motion because $p_j = \frac{\partial L}{\partial \dot{q}_j}$ | |
| Symmetry in Hamiltonian | $p_k$ is constant if $q_k \notin H$ | Obviously comes from $\dot{p}_j = -\frac{\partial H}{\partial q_j}$ |
| Viral Theorem, for averaging over (semi) periodic motion | $\lang T\rang =- \frac{1}{2}\lang \sum_i \vec{F}_i \cdot \vec{r}_i \rang$ | For central force $F=kr^n$, can show that $\lang T\rang = \frac{n+1}{2}\lang U \rang$ |
Special Notes
The key equation for Lagrangian is, for $L=L(q_i, q_i’;t)$ for any generalized coordinate $q_i, q_i’$ (representing the $s$ degrees of freedom of the system)
\[\frac{\partial L}{\partial q_i} - \frac{d}{dt}\frac{\partial L}{\partial q_i'}=0,\quad i \in [0,s]\]Hamiltonian comes from assuming a closed system, so $\frac{\partial L}{\partial t} = 0$, then using the fact that:
\[\frac{d}{dt}L = \sum_i \frac{\partial L}{\partial q_j}\dot{q}_j + \sum_j\frac{\partial L}{\partial \dot{q}_j}\ddot{q}_j + \frac{\partial L}{\partial t}\]And using the Lagrangian
\[\frac{\partial L}{\partial q_i} - \frac{d}{dt}\frac{\partial L}{\partial \dot{q}_i}=0\]Then you basically get:
\[\frac{d}{dt}\left(L- \sum_j \dot{q}_j \frac{\partial L}{\partial \dot{q}_j}\right)=0\]Chapter 8
| Conditions | Equations | Comments |
|---|---|---|
| Two body with central force $F=F(r)$, in the center of mass frame | $L=\frac{1}{2}\mu \vert \dot{\vec{r}}\vert ^2 - U(r)$ | reduced mass $\mu-\frac{m_1m_2}{m_1+m_2}$ |
| $L=\frac{1}{2}\mu(\dot{r}^2+r^2\dot{\theta}^2)-U(r)$ | The next step is to treat this as a one body with $m=\mu$ | |
| Hence $p_\theta=0$, angular momentum conserved. $l=\mu r^2\dot{\theta}$ | since it is cyclic in $\theta$ | |
| Kepler’s second law | $\frac{dA}{dt}=\frac{l}{2\mu}=\text{constant}$, areal velocity is constant | Only needs $F=F(r)$ to be true |
| Derived from $dA=\frac{1}{2}r^2d\theta$ | ||
| Equation of motion. Only requires a closed system and $F=F(r)$ | $\dot{r}=\pm \sqrt{\frac{2}{\mu}(E-U)-\frac{l^2}{\mu^2r^2}}$ | $\dot{r}=\dot{r}(r)$! |
| Derived from conservation of energy | ||
| $\theta(r)=\int \frac{\pm (\frac{l}{\mu r^2})}{\sqrt{2\mu (E-U-\frac{l^2}{2\mu r^2})}} dr$ | $\theta=\theta(r)$! | |
| $\dot{\theta}=l/(\mu r^2)$ | $\dot{\theta}=\dot{\theta}(r)$!, shown from conservation of angular momentum | |
| Geometry of orbit $r$ from only $F(r)$ | $\frac{d^2}{d\theta^2}\frac{1}{r} + \frac{1}{r} = -\frac{\mu r^2}{l^2}F(r)$ | |
| $r_{\min}, r_{\max}$ of orbit, so $r_{\min}\le r\le r_{\max}$ | solve $E-U-\frac{l^2}{2\mu r^2}=0$ | from putting $\dot{r}=0$, obtain two solutions |
| for circular orbit, will find $r_{\min}, =r_{\max}$ | ||
| Closed orbit if $\Delta \theta = \frac{b}{a}2\pi$, so it repeats itself | \(\Delta\theta(r)=2\int_{r_\min}^{r_\max} \frac{l/r^2}{\sqrt{2\mu (E-U-\frac{l^2}{2\mu r^2})}} dr\) | Can be used to show that if $U=r^{n+1}$, then closed iff $n=-2,+1$. |
| Effective Potential | $V(r)=U(r)-\frac{l^2}{2\mu r^2}$ | Used so that $E-V$ gives you $\frac{1}{2}\mu\dot{r}^2$, which is kinetic energy in radial direction |
| From Now ON, we START to assume $F\propto r^{-2}$ | All the previous results are true for any $F=F(r)$ | |
| Kepler’s First law | $\frac{\alpha}{r}=1+\epsilon\cos(\theta)$ | relates $r,\theta$, and $l,E$! |
| $\epsilon = \sqrt{1+\frac{2El^2}{\mu k^2}}$ | $\epsilon = \epsilon(E)$! A constant! | |
| $\alpha = l^2 / (\mu k)$ | $\alpha = \alpha(l)$! Also a constant | |
| Derived from performing the integral of $\theta = \theta (r)$ | ||
| Geometry of Orbit if given $E$ or $\epsilon$ | $\epsilon > 1, E > 0$ | Hyperbola. Escapes! |
| \(\epsilon =1, E = 0\) | Parabola, Just escapes! | |
| $0<\epsilon <1, V_{\min}<E<0$ | Ellipse. Bounded orbit | |
| $\epsilon =0, V_{\min}=E$ | Circular. Bounded. | |
| For planetary elliptical motion | $a = \frac{\alpha}{1-\epsilon^2} = \frac{k}{2\vert E\vert }$ | $a$ is half of the major axis. Determined once $E$ is known! |
| $b = \frac{\alpha}{\sqrt{1-\epsilon^2}} = \frac{l}{\sqrt{2\mu \vert E\vert }}$ | $b$ is half of the minor axis. Determined once $E$ is known! | |
| $r_\min = a(1-\epsilon)=\frac{\alpha}{1+\epsilon}$ | Pedigree. Determined once $E$ or $\epsilon$ is known! | |
| $r_\max = a(1+\epsilon)=\frac{\alpha}{1-\epsilon}$ | Apogee. Determined once $E$ or $\epsilon$ is known! | |
| Total Energy of an orbit | $E= - k /(2a)$ | Obvious if we use the equation above about $a$. |
| $T=-\frac{1}{2}U$ | From $E=T+U$ or from Viral theorem since we have a periodic orbit | |
| Kepler’s Third Law | $\tau^2 = \frac{4 \pi^2 \mu}{k}a^3$ | Period is completely determined by knowing one of the axis! |
| Stability of Circular Orbit, for $F=-k/r^n$ | $(3-n)l^2/\mu > 0$, so $n < 3$ | Basically, if you are stable at $r=r_0$, then $\frac{\partial V}{\partial r}\vert _{r_0}=0$ and $\frac{\partial^2 V}{\partial r^2}\vert _{r_0} < 0$, so that $\dot{r}$ is stable. |
| Stability of Circular Orbit at $r=\rho$, for $F=-\mu g(r)$ | $\frac{F’(\rho)}{F(\rho)} + \frac{3}{\rho} > 0$ | consistent with above |
| Precession due to force being $F=kr^{-2}+\rho(r)$ | Precession angle is $\Delta = 2\pi \delta / \alpha$ | |
| $\delta, \alpha$ comes from putting stuff into the equation $\frac{d^2}{d\theta^2}u + u = \frac{1}{\alpha}+u^2\delta$ |
Special Note
The following equations of motion is true for any $F=F(r)$:
\[\dot{r}=\pm \sqrt{\frac{2}{\mu}(E-U)-\frac{l^2}{\mu^2r^2}} = \dot{r}(r)\]where $E, l$ are constants. Then, consider expressing $\frac{d\theta}{dr}=\dot{\theta}/\dot{r}$:
\[\theta(r)=\int \frac{\pm (l/r^2)}{\sqrt{2\mu (E-U-\frac{l^2}{2\mu r^2})}} dr\]And this also holds in general:
\[\frac{d^2}{d\theta^2}\frac{1}{r} + \frac{1}{r} = -\frac{\mu r^2}{l^2}F(r)\](this can be shown by considering Lagrangian for $\dot{r}$ that $\frac{\partial L}{\partial r}-\frac{d}{dt}\frac{\partial L}{\partial \dot{r}}=0$, and use $u=\frac{1}{r}$ substitution). From there we also has the effective potential:
\[V(r)=U(r)-\frac{l^2}{2\mu r^2}\]so that $E-V$ is the kinetic energy in radial direction, i.e. for $\frac{1}{2}\mu\dot{r}^2$.
Now, we start to assume that $F \propto r^{-2}$. Then we can say:
\[\frac{\alpha}{r}=1+\epsilon\cos(\theta)\]derived from substituiung $U=-k/r$ and defined $u=1/r$ to compute:
\[\theta(r)=\int \frac{ l/r^2}{\sqrt{2\mu (E-U-\frac{l^2}{2\mu r^2})}} dr\]Then, using areal velocity we can determine the period. Since we know:
\[\begin{cases} A=\pi a b\\ \frac{dA}{dt} = l/(2\mu)\\ \end{cases}\]Then from using basically that $\tau = \int_0^\tau dt = \frac{2\mu}{l}\int_0^A dA$, we can show that:
\[\tau = \frac{2\mu}{l}\pi ab= \frac{2\mu \pi}{l}\sqrt{\alpha a} \to \tau^2 = \frac{4 \pi^2 \mu}{k}a^3\]By basically substituting in the definition of $\alpha = l^2 / (\mu k)$.
Stability of Circular Orbit at $r=\rho$, for $F=-\mu g(r)$. The derivation essentially comes from reaching:
\[\ddot{r}-r\dot{\theta} = \ddot{r}-\frac{l^2}{\mu^2 r^3} = -g(r)\]Then since it is a differential equation only of $r$, we consider apply some small perturbation away from equilibrium such that $r=\rho + x$, for small $x$. So that $\rho$ is equilibrium and we are interested in motion of displacement $x(t)$ from equilibrium.
Note
This technique is very general and useful for any given EoM: $\ddot{r}= f(r)$, as all you need to do is for $r=\rho + x$
- at equilibrium $0 = f(\rho)$
- compute $\ddot{x} = f(\rho + x)$, using (binomial) expansions for the RHS to get it to linear terms
- put into $\ddot{x}= - \omega^2 x$ form, and done.
Eventually you will reach something like:
\[\ddot{x}+\left[ \frac{3g(\rho)}{\rho} + g'(\rho) \right]x \approx 0\]which is Oscillation equation with frequency
\[\omega^2_0 = \frac{3g(\rho)}{\rho} + g'(\rho)\]which is only oscillatory if $\omega^2_0 > 0$.
Precession angle basically is solved by considering how many MORE angle do I need to get back from $r_\min$ to $r_\min$ of the next iteration. The book gives an example specifying the force, so check that. But the general idea is:
First since we have the force, we use:
\[\frac{d^2}{d\theta^2}u + u = \frac{1}{\alpha}+u^2\delta\]then use successive approximation to solve $u$. This basically gives:
\[u = \frac{1}{\alpha}\left(1+ \epsilon \cos (\theta - \frac{\delta}{\alpha}\theta)\right)\]Finally, to reach the same $r_\min$ means to reach the same $u$. So Basically it is just:
\[\theta - \frac{\delta}{\alpha}\theta = 2\pi \to \theta = 2\pi + \Delta\]so the $\Delta$ is the precession angle.
Chapter 10
| Conditions | Equations | Comments |
|---|---|---|
| Any quantity $\vec{Q}$ originates from inside the rotating frame | $\left(\frac{d\vec{Q}}{dt}\right){\text{fixed}}=\left(\frac{d\vec{Q}}{dt}\right){\text{rot}} + \vec{w}_{\text{sys}}\times \vec{Q}$ | $\left(\frac{d\vec{Q}}{dt}\right)_{\text{rot}}$ is rate pf change of $\vec{Q}$ measured inside the rotating frame |
| $\vec{w}_{sys}$ is the rotation of the rotating frame | ||
| $\vec{r}’$ be the inertial position vector and $\vec{r}$ is the rotating position vector | $\left(\frac{d\vec{r}’}{dt}\right){\text{fixed}}=\left(\frac{d\vec{R}}{dt}\right){\text{fixed}}+\left(\frac{d\vec{r}}{dt}\right)_{\text{fixed}}$ | |
| $\vec{v}{\text{fixed}} = \vec{V} + \vec{v}{\text{rot}} + \vec{w} \times \vec{r}$ | derived from above | |
| $\vec{w} \equiv \vec{w}{sys}$, and $\vec{V}=\left(\frac{d\vec{R}}{dt}\right){\text{fixed}}$ | ||
| Experienced force $\vec{F}_{\text{eff}}$ in a rotating frame | $\vec{F}{\text{eff}}=m\vec{a}{rot}=\vec{F}-m\ddot{\vec{R}}f - m \dot{\vec{w}}\times \vec{r} - m\vec{w}\times (\vec{w} \times \vec{r})-2m\vec{w}\times\vec{v}{rot}$ | $\vec{F}$ is the real force in inertial frame |
| $\ddot{\vec{R}}_f = \vec{w}\times \dot{\vec{R}}_f = \vec{w}\times \vec{w}\times \vec{R}_f$ | if $\vec{R}_f$ is from center of earth to its surface | |
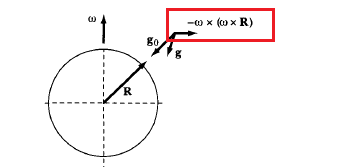
| Simplified Experienced Force if on Earth | $\vec{F}{\text{eff}}=m\vec{a}{rot}=\vec{S}+m\vec{g} -2m\vec{w}\times\vec{v}_{rot}$ | $\vec{S}$ real force other than gravity |
| $\vec{g} \equiv \vec{g}_0 -\vec{w}\times [\vec{w} \times (\vec{R}+\vec{r})]$ | for $\vec{r} « \vec{R}$ this value is a constant |
Special Notes
The key derivation concept used throughout the chapter is to consider any quantity $\vec{Q}$ fixed w.r.t. the rotating frame:
\[\left(d\vec{Q}\right)_{\text{fixed}} = d\theta \times \vec{Q}\]Hence, you get:
\[\left(\frac{d\vec{Q}}{dt}\right)_{\text{fixed}}= \vec{w}_{\text{sys}}\times \vec{Q}\]Then if the quantity $\vec{Q}$ is measured to be moving within the rotating frame:
\[\left(\frac{d\vec{Q}}{dt}\right)_{\text{fixed}}=\left(\frac{d\vec{Q}}{dt}\right)_{\text{fixed}} + \vec{w}_{\text{sys}}\times \vec{Q}\]In the equation:
\[\vec{F}_{\text{eff}}=m\vec{a}_{rot}=\vec{F}-m\ddot{\vec{R}}_f - m \dot{\vec{w}}\times \vec{r} - m\vec{w}\times (\vec{w} \times \vec{r})-2m\vec{w}\times\vec{v}_{rot}\]the term:
- $-m\vec{w}\times (\vec{w} \times \vec{r})$ is basically a centrifugal force
- $-2m\vec{w}\times\vec{v}_{rot}$ is the Coriolis force that is perpendicular to $\vec{v}_{rot}$
All of those “forces” are fictitious force added such that the EoM would match our experimental observation in a rotating frame.
| Centrifugal | Coriolis |
|---|---|
 |
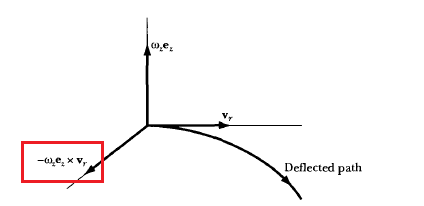 |
| Deflect gravity | Deflect velocity |
Solving for two coupled equations (with opposite sign)
Consider equations like:
\[\begin{cases} \ddot{x} = 2 \omega_z \dot{y}\\ \ddot{y} = -2 \omega_z \dot{x} \end{cases}\]If you consider $q = x+y$, then it doesn’t work as you will get:
\[\ddot{q} = \ddot{x} + \ddot{y} = -2\omega_z (\dot{x}-\dot{y})\]But realize the trick that:
\[(i\dot{x} - \dot{y}) = i(\dot{x} + i\dot{y})\]Therefore, if you consider $q = x + iy$, then it will magically work:
\[\ddot{q} = \ddot{x} + i\ddot{y} = -2 \omega_z i(\dot{x}+i\dot{y}) = -2\omega_z i\dot{q}\]which you can solve.
Chapter 11
| Conditions | Equations | Comments |
|---|---|---|
| (Recap) $\vec{L}$ in Lab/Fixed Frame $\vec{r}=\vec{r}f+\vec{r}{rot}$ | $\vec{L} = \sum_i \vec{r}_i \times \vec{p}_i$ | $\vec{r}_i$ is from origin of fixed frame to the body |
| $\vec{L} = (\vec{r}{cm} \times \vec{p}{cm}) + I\vec{w}$ | $I$ is inertia tensor will be defined then w.r.t to CoM frame | |
| Consistent with other derived parts | ||
| (Recap) $\vec{\tau}$ is Lab/Fixed Frame | $\vec{\tau}=(\vec{r}{cm}\times \vec{F}{total}) + (\sum_{i}\vec{r}_i’ \times \vec{F}_i)$ | $\vec{r}_i’$ is the vector from CoM to the particle $i$ of the body |
| $d\vec{L}/dt = \vec{\tau}$ | Used for EoM | |
| Consistent with what we have | ||
| Kinetic Energy in Lab Frame, with Center of rotation at Frame $f$ | $T = \frac{1}{2}\sum_{\alpha} m_{\alpha}V_f^2 + (\vec{V}f\cdot \vec{w})\times\sum\alpha m_{\alpha} \vec{r}{\alpha} + \frac{1}{2} \sum\alpha m_{\alpha}(\vec{w}\times \vec{r})^2$ | $\vec{V}_f$ is the velocity of the moving frame itself |
| $T = \frac{1}{2}MV_f^2 + \frac{1}{2} \sum_\alpha m_{\alpha}(\vec{w}\times \vec{r})^2 = T_{trans} + T_{rot}$ | If moving frame is situated at Center of Mass, then $\sum_\alpha m_{\alpha} \vec{r}_{\alpha} =0$ | |
| Inertia Tensor | $T_{rot} = \frac{1}{2}\sum_{i,j}\omega_i\omega_j I_{ij} = \frac{1}{2}\vec{\omega}^TI\vec{\omega}$ | |
| $I_{ij} =\sum_\alpha m_\alpha( \delta_{ij}\sum_{k} x_{\alpha, {k}{rot}}^2 -x{\alpha, {i}{rot}}x{\alpha, {j}_{rot}})$ | example, $I_{11} = \sum_\alpha m_\alpha (x_{\alpha, 2}^2 + x_{\alpha, 3}^2)$ | |
| replace the sum of $m_\alpha$ by integral $\rho dV$ for continues mass | ||
| In the end, you will need to put $I$ and $\vec{\omega}$ into the same rotating axis-system (axis must be “not rotating” w.r.t $I$) | ||
| $\vec{L}$ w.r.t rotating axis fixed on the body without translation | $\vec{L}= \sum_{\alpha}\vec{r}{\alpha{rot}} \times \vec{p}{\alpha{real}} = I\vec{w}$ | the body is only rotating |
| $\vec{\tau} = \sum_{\alpha} \vec{r}{\alpha{rot}} \times \vec{F}{\alpha{real}}$ | consistent with what we had before | |
| sometimes calculating $\sum_{\alpha}\vec{r}{\alpha{rot}} \times \vec{p}{\alpha{real}}$ could be easier | ||
| Kinetic Energy and Angular Momentum | $T_{rot} = \frac{1}{2}\vec{\omega}^TI\vec{\omega}= \frac{1}{2}\vec{\omega}\cdot \vec{L}$ | Always remember that energies are useful for Lagrangian |
| Principle Moments of Inertia for some axis choice | $\mathbf{I}\vec{w}^* = I_\lambda \vec{\omega}^*$ | if $\vec{\omega}$ happens to be along principle axis |
| $\vec{\omega}^*$ along eigenvector | Basically principle axis direction = $\vec{w}$ along the eigenvector | |
| Parallel Axis Theorem | $J_{ij} = I_{ij} + M[\vert \vec{a}\vert ^2 \delta_{ij} - a_ia_j]$ | $\vec{a}$ is the vector from origin $Q$ to origin $O$ where $I_{ij}$ is defined |
| example: $J_{11} = I_{11}+M[a_2^2 + a_3^2]$ | ||
| Euler’s Angles | $\vec{x} = \mathbf{\lambda}\vec{x}’$, $\lambda$ is the rotational matrix | $\vec{x}$ is the rotational axis |
| $\lambda = \lambda_\psi\lambda_\theta \lambda_\phi$ | any $\vec{x}$ of the body rotating is the same as doing $\lambda\vec{x}’$ of the not-rotating body | |
 |
Any rotation $\vec{w}$ can be described by doing $\phi, \theta, \psi$ rotation | |
| Notice that $\phi, \theta, \psi$ points are not all in the direction of principle axis | ||
| $\vec{w} = \begin{bmatrix} \dot{\phi}\sin\theta\sin\psi + \dot{\theta}\cos\psi\ \dot{\phi}\sin\theta\cos\psi - \dot{\theta}\sin\psi\ \dot{\phi}\cos\theta+\dot{\psi}\end{bmatrix}$, in body-fixed $\vec{x}$ | Project $\vec{w}\phi = \dot{\phi}, \vec{w}\theta = \dot{\theta}, \vec{w}_\psi = \dot{\psi}$, into the principle/body frame $\vec{w}$ | |
| Euler’s equation for free body along principle axis | $(I_1 - I_2)\omega_1 \omega_2 - I_3 \dot{\omega}_3=0$ | with no net force, only rotation |
| $(I_2 - I_3)\omega_2 \omega_3 - I_1 \dot{\omega}_1=0$ | since we are at principle axis, use the $\vec{w}$ found above | |
| $(I_3 - I_1)\omega_3 \omega_1 - I_2\dot{\omega}_2=0$ | ||
| Euler’s equation for General body along principle axis | $(I_1 - I_2)\omega_1 \omega_2 - I_3 \dot{\omega}_3=\tau_1$ | with net force causing a torque |
| $(I_2 - I_3)\omega_2 \omega_3 - I_1 \dot{\omega}_1=\tau_2$ | everything defined along principle axis | |
| $(I_3 - I_1)\omega_3 \omega_1 - I_2\dot{\omega}_2=\tau_3$ | ||
| EoM of Force Free Motion of Symmetric Top $I_1=I_2$ | $\dot\omega_1 = - \left( \frac{I_3-I_1}{I_1}\omega_3 \right)\omega_2$ | Basically using force free Euler’s equatoin |
| $\dot\omega_2 = \left( \frac{I_3-I_1}{I_1}\omega_3 \right)\omega_1$ | ||
| $\omega_3(t)=\text{const}$ | ||
| Solution of Force Free Motion of Symmetric Top $I_1 = I_2$ | $\omega_1(t) = A\cos (\Omega t)$ | $\frac{I_3-I_1}{I_1}\omega_3 \equiv \Omega$ |
| $\omega_2(t) = A\sin (\Omega t)$ | Precession as $\omega_1,\omega_2$ traces out a circle | |
| $\omega_3(t)=\text{const}$ |
Special Notes
To derive the total kinetic energy of a moving + rotating rigid body, start with considering expressing $\vec{v}_{\alpha}$ in the fixed/lab frame:
\[\vec{v}_{\alpha_{fixed}} = \vec{V}_f + \vec{v}_{rot} + \vec{\omega} \times \vec{r}_{rot}=\vec{V}_f + \vec{\omega} \times \vec{r}_{rot}\]for the frame’s linear velocity being $\vec{V}f$ and $\vec{v}{rot}=\vec{0}$ since we are rotating with the frame itself.
Then, energy is simply:
\[\begin{align*} T &= \frac{1}{2}\sum_{\alpha} m_{\alpha}\vec{v}_{\alpha_{fixed}}^2\\ &= \frac{1}{2}\sum_{\alpha} m_{\alpha}V_f^2 + (\vec{V}_f\cdot \vec{w})\times\sum_\alpha m_{\alpha} \vec{r}_{\alpha} + \frac{1}{2} \sum_\alpha m_{\alpha}(\vec{w}\times \vec{r})^2\\ &= \frac{1}{2}MV_f^2 + (\vec{V}_f\cdot \vec{w})\times\sum_\alpha m_{\alpha} \vec{r}_{\alpha} + \frac{1}{2} \sum_\alpha m_{\alpha}(\vec{w}\times \vec{r})^2 \end{align*}\]and often $\vec{V}f = \vec{V}{cm}$ if we choose the frame to be located at center of mass
When you have a purely rotating body without translation:
\[\vec{L} = \sum_{\alpha}\vec{r}_{\alpha_{rot}} \times \vec{p}_{\alpha_{real}}\]for $\vec{r}\alpha$ is w.r.t the rotating axis and $\vec{p}\alpha$ is the real momentum in fixed frame.
Together with $\vec{\tau}$, we can write EoMs.
\[\vec{\tau} = \sum_{\alpha} \vec{r}_{\alpha_{rot}} \times \vec{F}_{\alpha_{real}}\]Derivation of Parallel Axis Theorem
The idea is actually simple. Consider you have already $I$ with origin at $\mathcal{O}$. Then, you want to calculate at $\mathcal{Q}$:
\[\vec{r}_Q = \vec{a}+ \vec{r}_O \to X = \vec{a} + \vec{x} \quad \text{ for easier identification}\]Then by definition:
\[\begin{align*} J_{ij} &=\sum_\alpha m_\alpha ( \delta_{ij}\sum_{k} X_{\alpha, {k}_{rot}}^2 -X_{\alpha, {i}_{rot}}X_{\alpha, {j}_{rot}})\\ &=\sum_\alpha m_\alpha \left[\delta_{ij}\sum_{k} (\vec{x}_{\alpha, {k}_{rot}}+\vec{a})^2 -(x_{\alpha, {i}_{rot}} + \vec{a})(x_{\alpha, {j}_{rot}} + \vec{a})\right] \end{align*}\]Then extract out the term $I_{ij} =\sum_\alpha m_\alpha ( \delta_{ij}\sum_{k} x_{\alpha, {k}{rot}}^2 -x{\alpha, {i}{rot}}x{\alpha, {j}_{rot}})$ in the expression you will obtain that
\[J_{ij} = I_{ij} + M[|\vec{a}|^2 \delta_{ij} - a_ia_j]\]Euler’s Angle and Rotation
Basically we can describe any rotation as $\phi, \theta, \psi$:
Then, if we project each $\vec{w}\phi = \dot{\phi}, \vec{w}\theta = \dot{\theta}, \vec{w}_\psi = \dot{\psi}$ back into body fixed frame:
\[\dot{\vec{\phi}} = \begin{bmatrix} \dot{\phi}\sin\theta\sin\psi \\ \dot{\phi}\sin\theta\cos\psi \\ \dot{\phi}\cos\theta\end{bmatrix}\] \[\dot{\vec{\theta}} = \begin{bmatrix} \dot{\theta}\cos\psi\\ - \dot{\theta}\sin\psi\\ 0\end{bmatrix}\] \[\dot{\vec{\psi}} = \begin{bmatrix} 0\\ 0\\ \psi\end{bmatrix}\]which makes sense because graphically $\dot{\psi}$ is along the z’ axis (body fixed axis already). Then, adding all of them up, total rotation $\vec{w}$ is:
\[\vec{w} = \begin{bmatrix} \dot{\phi}\sin\theta\sin\psi + \dot{\theta}\cos\psi\\ \dot{\phi}\sin\theta\cos\psi - \dot{\theta}\sin\psi\\ \dot{\phi}\cos\theta+\dot{\psi}\end{bmatrix}\]Euler’s equation for free body along principle axis
Using Lagrangian. Basically:
-
since there is no net force:
\[\mathcal{L} = T - 0\] -
Using principle axis
\[T = \frac{1}{2} \vec{w}^TI\vec{w} = \frac{1}{2} \sum_i I_i \omega_i^2\]for now we are at $\vec{\omega}$ in principle axis
-
To express $\omega$ in that axis, we can employ easily:
\[\vec{w} = \begin{bmatrix} \dot{\phi}\sin\theta\sin\psi + \dot{\theta}\cos\psi\\ \dot{\phi}\sin\theta\cos\psi - \dot{\theta}\sin\psi\\ \dot{\phi}\cos\theta+\dot{\psi}\end{bmatrix}\]which is already in that axis. So we have $\mathcal{L} = \mathcal{L}[\phi, \dot{\phi}, \theta, \dot{\theta}, \psi, \dot{\psi}]$
-
Use the Lagrangian EoM and obtain:
\[\begin{align*} \frac{\partial T}{\partial \psi} - \frac{d}{dt}\frac{\partial T}{\partial \dot{\psi}} &= 0\\ \frac{\partial T}{\partial \vec{w}}\frac{\partial\vec{w}}{\partial\psi} - \frac{d}{dt}\frac{\partial T}{\partial \vec{\omega}}\frac{\partial\vec{w}}{\partial \dot{\psi}} &= 0\\ \sum_i\frac{\partial T}{\partial w_i}\frac{\partial w_i}{\partial\psi} - \frac{d}{dt}\sum_i\frac{\partial T}{\partial \omega_i}\frac{\partial \omega_i}{\partial \dot{\psi}} &= 0 \end{align*}\]and compute since we have $\omega, T$ as a function of the angles
-
Obtain:
\[(I_1 - I_2)\omega_1 \omega_2 - I_3 \dot{\omega}_3=0\] -
Permute it. (Do not try to compute the Lagrangian of $\theta, \phi$, which will be tough)
Chapter 12
| Conditions | Equations | Comments |
|---|---|---|
| Coupled Oscillator of 2 Bodies (using algebra) | $\eta_1 = x_1 - x_2 \equiv C_1 e^{i\omega_1 t}+C_2 e^{-i\omega_1 t}$ | Basically arrive at EoM and assume oscillatory solution |
| $\eta_2 = x_1 + x_2 \equiv D_1 e^{i\omega_2 t}+D_2 e^{-i\omega_2 t}$ | ||
| $\omega_1 = \sqrt{(\kappa + 2 \kappa_{13} )/m}$ | Solved from plugging in the solution back into EoM, obtaining the characteristic Equation | |
| \(\omega_2 = \sqrt{\kappa/m}\) | ||
| Coupled Oscillator of 2 Bodies (using linear algebra) | $\ddot{X} = MX$ | EoM with Matrices |
| $\ddot{X}=Q\Lambda Q^{-1}X\to Q^{-1}\ddot{X}=\Lambda Q^{-1}X$ | where $Q^{-1}X$ is transforming into the eigenspace | |
| $Q^{-1}X$ is the space where motion are decoupled. | ||
| Eigenvalue in $\Lambda$ is therefore the frequency of the normal modes | ||
| Splitting of energy | $\omega_0 = \sqrt{(\kappa + \kappa_{12})/M}$ | frequency when one mass held fix |
| $\omega_1 > \omega_0 > \omega_2$ | splitting of frequency due to coupling | |
| Weak Coupling, $\kappa_{12} « \kappa$ | $\omega_1\approx \omega_0(1+\epsilon)$ | Solved from $\omega_0 \approx (1+\epsilon)\cdot \sqrt{\kappa/m}$ |
| $\omega_2\approx \omega_0(1-\epsilon)$ | $\epsilon = \kappa_{12}/(2\kappa)$ | |
| Coupled Oscillator of two body with weak coupling, with $x_1(0)=D,x_2(0)=0$ | $x_1(t)=[D\cos(\epsilon \omega_0 t)]\cos(\omega_0 t)$ | Solved from $(D/2)\cos (\omega_1 t) + (D/2)\sin (\omega_2 t)$ and matching initial conditions |
| $x_2(t)=[D\sin(\epsilon \omega_0 t)]\sin(\omega_0 t)$ | ||
| Loaded String | $m\ddot{z}j = - (T/d)(z{j-1}-2z_j + z_{j+1})$ | $T/d \equiv \kappa$ |
| $\ddot{z} = c^2 \cdot {\partial^2 z}/{\partial x^2}$ | Helmholtz equation from PDE | |
| $c^2 = \kappa d^2 / m$ | ||
| $z_n(x,t) = \sin(n\pi x/L)(A_n \cos (n\pi ct / L) + B_n \sin(n\pi ct/L))$ | Fourier Series. Solve $A_n, B_n$ using orthogonality | |
| initial condition $z(0,t)=f(x),z_t(0,t)=g(x)$ needs to be specified | ||
| $z_n(x,t) = D_n\sin(n\pi x/L)\sin(\omega_n t+ \theta_n)$ | same solution using trig identity, $\omega_n = (n \pi c /L)$ | |
| $z_n(x,t) = (D_n/2) \cdot [ \cos (n\pi (x-ct)/L) + \sin(n\pi (x-ct)/L)]$ | compound angle from above |
Special Notes
Weak Coupling:
Using Binomial expansion of $\sqrt{1+ 2\epsilon}$ you get:
\[\omega_0 =\sqrt{\frac{\kappa}{m}} (1+ \epsilon)\]for $\epsilon = \kappa_{12}/(2\kappa)$. Then, express $\omega_1, \omega_2$ in terms of $\omega_0$ and we get what we want.
Loaded String
First we ignored gravity, then if we consider a string particle with mass $m$ at the $j$-th position
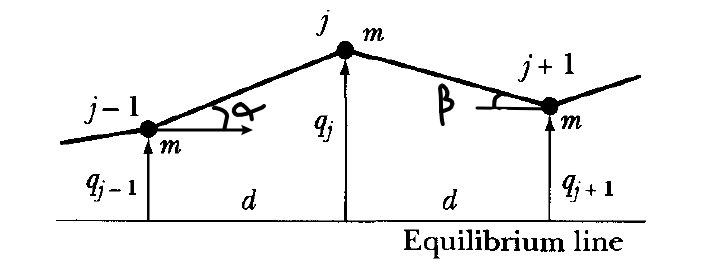
Then the vertical restoring force is given by, if the tension $T$ is the same:
\[\begin{align*} F_j &= -T \sin (\alpha) - T \sin (\beta)\\ &= -T \left( \frac{z_j - z_{j-1}}{d} \right)-T \left( \frac{z_{j+1} - z_{j}}{d} \right)\\ &= \frac{T}{d}(z_{j-1}-2z_j + z_{j+1} )\\ &= m \frac{d^2z}{dt^2} \end{align*}\]But then, if we consider $z(x,t)$, we notice that the second derivative:
\[\begin{align*} \frac{\partial^2 z}{\partial x^2} &= \frac{1}{d}(\text{changes of rate of chage of $z(x)$})\\ &= \frac{1}{d}\left( \frac{(z_{j+1}-z_j) - (z_j - z_{j-1})}{d} \right)\\ &= \frac{1}{d^2}\left(z_{j-1}- 2z_j + z_{j+1}\right) \end{align*}\]Then we get, letting $\kappa = T/d$
\[\frac{\partial^2z}{\partial t^2} = \frac{\kappa d^2}{m}\frac{\partial^2 z}{\partial x^2}\]which if we define $c^2 = \kappa d^2 /m$, we get the Helmholtz equation:
\[\frac{\partial^2z}{\partial t^2} = c^2\frac{\partial^2 z}{\partial x^2}\]which basically is solved using the technique in PDE with assuming $z(x,t)=\psi(x)h(t)$ and solve separately.